这里主要讲残差的基础入门,也就是残差块。
参考资料
什么是残差(residual)? 残差在数理统计中是指实际观察值与估计值(拟合值)之间的差。如果回归模型正确的话, 我们可以将残差看作误差的观测值。
更准确地,假设我们想要找一个 𝑥,使得 𝑓(𝑥)=𝑏 ,给定一个 𝑥 的估计值 $ x_0 $ ,残差(residual)就是 𝑏−𝑓(𝑥0),同时,误差就是 $ 𝑥−𝑥_0 $。
即使 𝑥 不知道,我们仍然可以计算残差,只是不能计算误差罢了。
什么是残差网络(Residual Networks,ResNets)?
在了解残差网络之前,先了解下面这个问题。
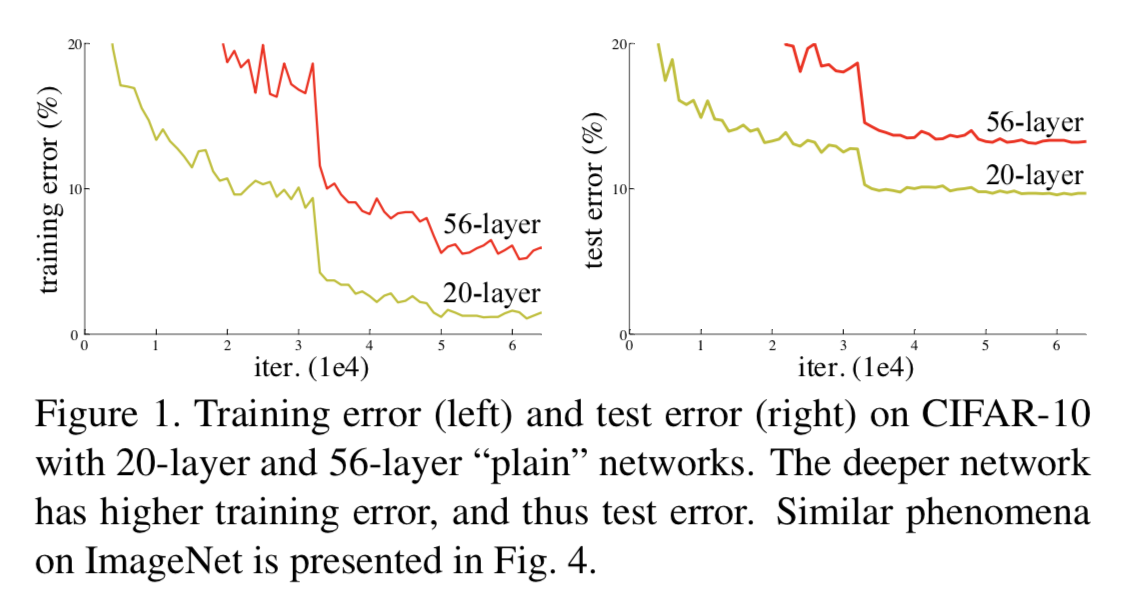
Q1:神经网络越深越好吗?(Deeper is better?)
A1:如图所示,在训练集上,传统神经网络越深效果不一定越好。而 Deep Residual Learning for Image Recognition 这篇论文认为,理论上,可以训练一个 shallower 网络,然后在这个训练好的 shallower 网络上堆几层 identity mapping(恒等映射) 的层,即输出等于输入的层,构建出一个 deeper 网络。这两个网络(shallower 和 deeper)得到的结果应该是一模一样的,因为堆上去的层都是 identity mapping。这样可以得出一个结论:理论上,在训练集上,Deeper 不应该比 shallower 差,即越深的网络不会比浅层的网络效果差。但为什么会出现图 这样的情况呢,随着层数的增多,训练集上的效果变差?这被称为退化问题(degradation problem),原因是随着网络越来越深,训练变得原来越难,网络的优化变得越来越难。理论上,越深的网络,效果应该更好;但实际上,由于训练难度,过深的网络会产生退化问题,效果反而不如相对较浅的网络。而残差网络就可以解决这个问题的,残差网络越深,训练集上的效果会越好。(测试集上的效果可能涉及过拟合问题。过拟合问题指的是测试集上的效果和训练集上的效果之间有差距。)
plain network指的是没有使用 shortcut connection 的网络
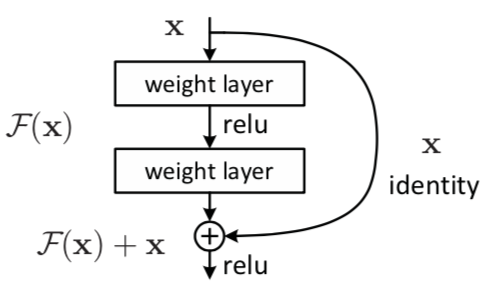
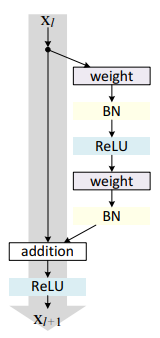
残差网络通过加入 shortcut connections,变得更加容易被优化。包含一个 shortcut connection 的几层网络被称为一个残差块(residual block),如下图所示。(shortcut connection,即图右侧从𝑥 到 ⨁ 的箭头)
而右侧的弧线,通常为
里面的 weight layer 可以根据需求自己规定,这里使用 conv 也就是卷积作为 weight layer。
残差块(residual block)
如上图所示,𝑥 表示输入,𝐹(𝑥) 表示残差块在第二层激活函数之前的输出,即 $ 𝐹(𝑥)=𝑊_2𝜎(𝑊_1𝑥) $,其中 $ 𝑊_1 $ 和 $ 𝑊_2 $ 表示第一层和第二层的权重,𝜎 表示 ReLU 激活函数。(这里省略了 bias)最后残差块的输出是 𝜎(𝐹(𝑥)+𝑥)。
当没有 shortcut connection(即上图右侧从 𝑥 到 ⨁ 的箭头)时,残差块就是一个普通的 2 层网络。残差块中的网络可以是全连接层,也可以是卷积层。设第二层网络在激活函数之前的输出为 𝐻(𝑥)。如果在该 2 层网络中,最优的输出就是输入 𝑥,那么对于没有 shortcut connection 的网络,就需要将其优化成 𝐻(𝑥)=𝑥,对于有 shortcut connection 的网络,即残差块,如果最优输出是 𝑥,则只需要将 𝐹(𝑥)=𝐻(𝑥)−𝑥 优化为 0 即可。后者的优化会比前者简单。这也是残差这一叫法的由来。
上面说的有点弯弯绕绕,还是直接举例子吧。
ps: 当时我这个是为了处理一维信号,所以,可以根据需求来更改
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 class ResBlock (nn.Module) : def __init__ (self, inchannel, outchannel, stride=1 ) : super(ResBlock, self).__init__() self.left = nn.Sequential( nn.Conv2d(inchannel, outchannel, kernel_size=(1 , 3 ), stride=stride, padding=(0 , 1 ), bias=False ), nn.BatchNorm2d(outchannel), nn.ReLU(inplace=True ), nn.Conv2d(outchannel, outchannel, kernel_size=(1 , 3 ), stride=1 , padding=(0 , 1 ), bias=False ), nn.BatchNorm2d(outchannel) ) self.shortcut = nn.Sequential() if stride != 1 or inchannel != outchannel: self.shortcut = nn.Sequential( nn.Conv2d(inchannel, outchannel, kernel_size=1 , stride=stride, bias=False ), nn.BatchNorm2d(outchannel) ) def forward (self, x) : out = self.left(x) out = out + self.shortcut(x) out = F.relu(out) return out
上面是一个残差块。
left 表示正常的卷积网络。
关于 cnn 的网络计算公式为
这里看一下计算过程,假如说输入的为 (1,1000) 的信号,则第一层 conv 输出的信号为
根据公式第一层卷积为
$$ 输出尺寸 = \frac {1000 - 3 + 2 * 1 }{1} + 1 = 1000 $$
第二层的卷积同样是
$$ 输出尺寸 = \frac {1000 - 3 + 2 * 1 }{1} + 1 = 1000 $$
所以,输出后其数据构造还是 (1,1000)
而往往前面真实的数据为
(N,C,1,1000)
N 为 batch_size
C 为 channel
shortcut 表示图中右边的弧线,其会把最开始输入的 x 变成和 left 输出的信号变成一样的,即 x 也会变成 (N,C,1,1000)
假如说, left 的输出为 N,C,1,1000 shortcut 的输出为 N,C,1,1000 ,那么,两者相加是多少?
是
N,C,1,1000最终,我们是讲 1,1000 中的值,进行 N ,C 匹配想加。
所以,两个相加得到的值可能会超过 1 ,所以,两者想加完之后,会进行一个 relu
其实残差只是一个思想,把前几层的数值添加到后几层中,使得网络结构可以更深。
所以,我们可以对残差块进行一个修改。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 class ResBlock (nn.Module) : def __init__ (self, inchannel, outchannel, stride=1 ) : super(ResBlock, self).__init__() self.left = nn.Sequential( nn.Conv2d(inchannel, outchannel, kernel_size=(1 , 3 ), stride=stride, padding=(0 , 1 ), bias=False ), nn.BatchNorm2d(outchannel), nn.ReLU(inplace=True ), nn.Conv2d(outchannel, outchannel, kernel_size=(1 , 3 ), stride=1 , padding=(0 , 1 ), bias=False ), nn.BatchNorm2d(outchannel) ) def forward (self, x) : shortcut = self.left(x) out = out + shortcut out = F.relu(out) return out
这里是直接将 x 添加到输出层了。
现在的残差块相加都是 (N,C,1,1000) 但是,我觉得,我们也可以这样相加
(N,C,1,1000) + (N,C,1,1000) = (N,2C,1,1000)而且,我觉得这样更加合理。相关的代码在这里不写了。
另外,我们需要注意的是
假设尺寸变化,那么相加需要满足图像大小相同才能添加。
假设,最后得出的图像不同,那该如何写代码?
在这里,建议参考,我下面的博客,以后,我也会专门对照这个代码写一下 resnet 的代码
上面的博文主要看特征融合那一栏。
里面的思想有
(N,C,1,1000) + (N,C,1,1000) = (N,2C,1,1000)解决尺寸不匹配问题
残差网络
残差网络主要是讲残差块组合在一起。
只见看一下代码吧。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 import torchimport torch.nn as nnimport torch.nn.functional as Fimport numpy as npclass ResBlock (nn.Module) : def __init__ (self, inchannel, outchannel, stride=1 ) : super(ResBlock, self).__init__() self.left = nn.Sequential( nn.Conv2d(inchannel, outchannel, kernel_size=(1 , 3 ), stride=stride, padding=(0 , 1 ), bias=False ), nn.BatchNorm2d(outchannel), nn.ReLU(inplace=True ), nn.Conv2d(outchannel, outchannel, kernel_size=(1 , 3 ), stride=1 , padding=(0 , 1 ), bias=False ), nn.BatchNorm2d(outchannel) ) self.shortcut = nn.Sequential() if stride != 1 or inchannel != outchannel: self.shortcut = nn.Sequential( nn.Conv2d(inchannel, outchannel, kernel_size=1 , stride=stride, bias=False ), nn.BatchNorm2d(outchannel) ) def forward (self, x) : out = self.left(x) out = out + self.shortcut(x) out = F.relu(out) return out class ResNet (nn.Module) : def __init__ (self, ResBlock, num_classes=1000 ) : super(ResNet, self).__init__() self.inchannel = 64 self.conv1 = nn.Sequential( nn.Conv2d(1 , 64 , kernel_size=(1 , 3 ), stride=1 , padding=(0 , 1 ), bias=False ), nn.BatchNorm2d(64 ), nn.ReLU() ) self.layer1 = self.make_layer(ResBlock, 64 , 2 , stride=1 ) self.layer2 = self.make_layer(ResBlock, 128 , 2 , stride=2 ) self.layer3 = self.make_layer(ResBlock, 256 , 2 , stride=2 ) self.layer4 = self.make_layer(ResBlock, 512 , 2 , stride=2 ) self.fc = nn.Linear(15872 , num_classes) def make_layer (self, block, channels, num_blocks, stride) : strides = [stride] + [1 ] * (num_blocks - 1 ) layers = [] for stride in strides: layers.append(block(self.inchannel, channels, stride)) self.inchannel = channels return nn.Sequential(*layers) def forward (self, x) : out = self.conv1(x) out = self.layer1(out) out = self.layer2(out) out = self.layer3(out) out = self.layer4(out) out = F.avg_pool2d(out, kernel_size=(1 , 4 )) out = out.view(out.size(0 ), -1 ) out = self.fc(out).reshape((out.shape[0 ], 1 , 1 , 1000 )) return out
这里面代码都非常好理解,在这里,主要是对 make_layer 这个函数做解释。
1 2 3 4 5 6 7 8 def make_layer (self, block, channels, num_blocks, stride) : strides = [stride] + [1 ] * (num_blocks - 1 ) layers = [] for stride in strides: layers.append(block(self.inchannel, channels, stride)) self.inchannel = channels return nn.Sequential(*layers)
make_layer 指的是最终 resnet 是几层网络,比如,有 resnet-18,resnet-32,resnet-50 等。
像这个网络结构就是 resnet-18。
关于为什么是 restnet-18 请参考我下面的博文。